FATSHARK HDO2 やら Orca やら Skyzone Sky03Oやら。
新型ゴーグルが目白押し。
周りでも購入者が出てきましたが、あちらが立てばコチラが立たず。
うーん悩ましい。
ここはしばらく DJI FPV を活用してしのぐのもありではないか。
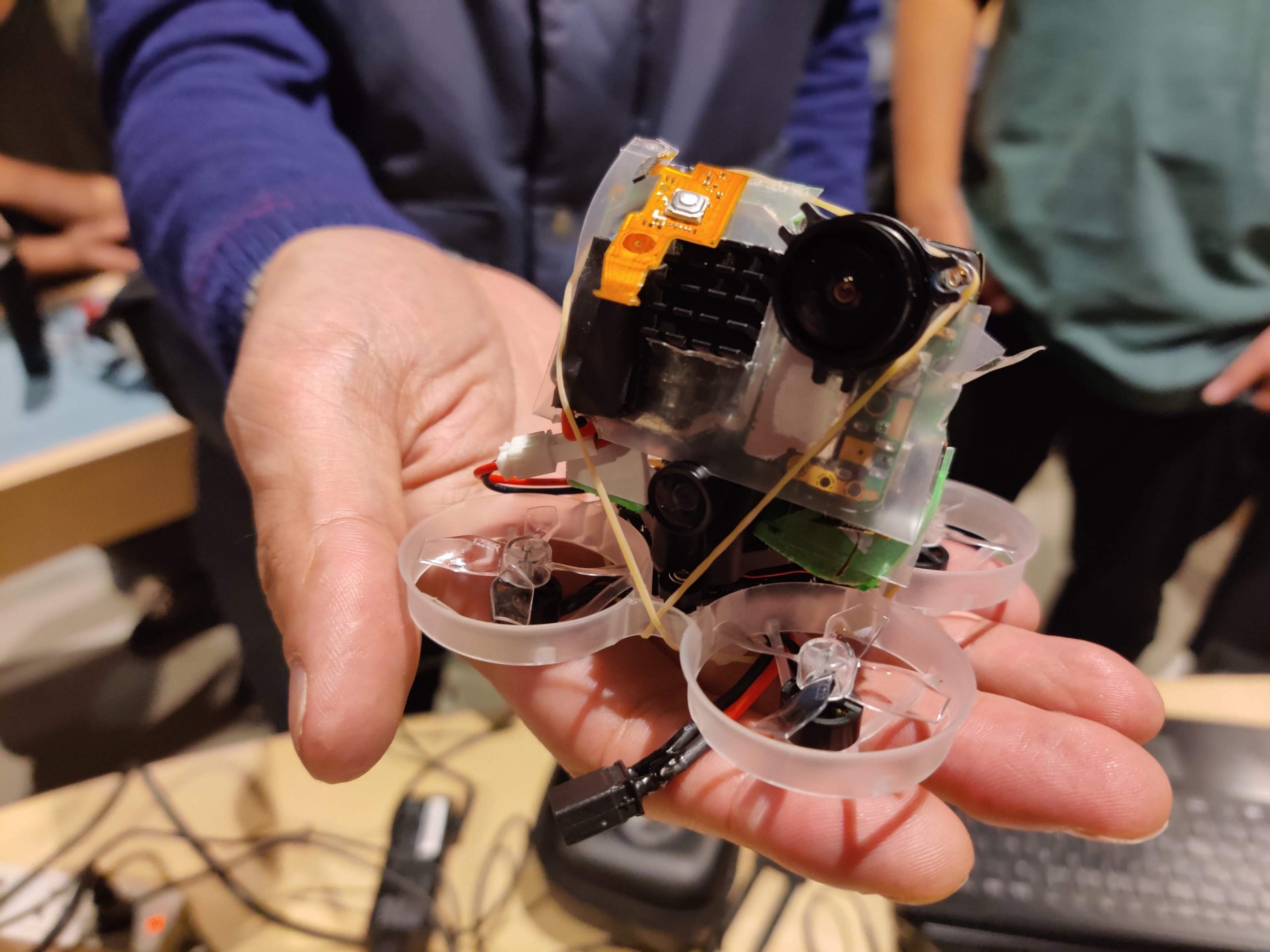
ということで、ものすごいややこしいことをして、5.8GHz VTX 映像を、DJI Digital FPV ゴーグルで受信できるようにしてみた。

いよいよもってイカツイな。おっさん大丈夫か。
いろいろ部品も揃えて試してみたけど、最終的にはこの構成になった。

技適ある上に、お金かけて業務局を開局しているので、無改造ですむコチラをチョイス。
https://jp.banggood.com/URUAV-5_8G-RX-PORT-2_0-DJI-Digital-FPV-Goggles-Simulation-Receiver-Board-for-DJI-Fatshark-FPV-Goggles-p-1605285.html
レシーバーは使い勝手がよく、映像のキレイな RapidFire を使いたかったが、RapidFire はチャンネル切替のたびに切れるというトラブル。
しゃーないので、予備部品になっていた Eachine PRO58 RX を使った。
DJI ゴーグルは双方向通信で、ほっといても電波出してしまう。
ということで、4つあるアンテナにはダミーロードを設置し、電波を遮断してみた。金色の角がそれだ。
今度、電波暗室に持ち込んで漏れてないか計測してみる。
(写真のものは業務局申請済のもの為念)
これによって業務局を開局しなくても、このゴーグルを使うことができるはず。
値段は550ドルぐらいで、まあ改造とかいるけど、ハイエンドクラスの他社ゴーグルと十分戦える価格帯になる。
電源は 12v 以上を要求され、実は電源関係がめんどい。
XT60 端子に5インチ用バッテリつなぐのが、一番確実ということになった。
スイッチを増設してあるが、再ブートに時間がかかるので、基本入れっぱの運用になりそう。
で、使ってみてどうだったか。
見える画面はキレイで大きい。
HDO2 の見た目に一番近いかな。
個人的に遅延はそれほどないように思う。
私程度が飛ばすのには支障はなかった。
ゴーグルのブートに時間がかかる。
ブート後「AV IN」を選択する一手間あり。
DVR は録画ボタンを押すことでできる。
DVR の比較映像がコチラ。(比較動画つくった)
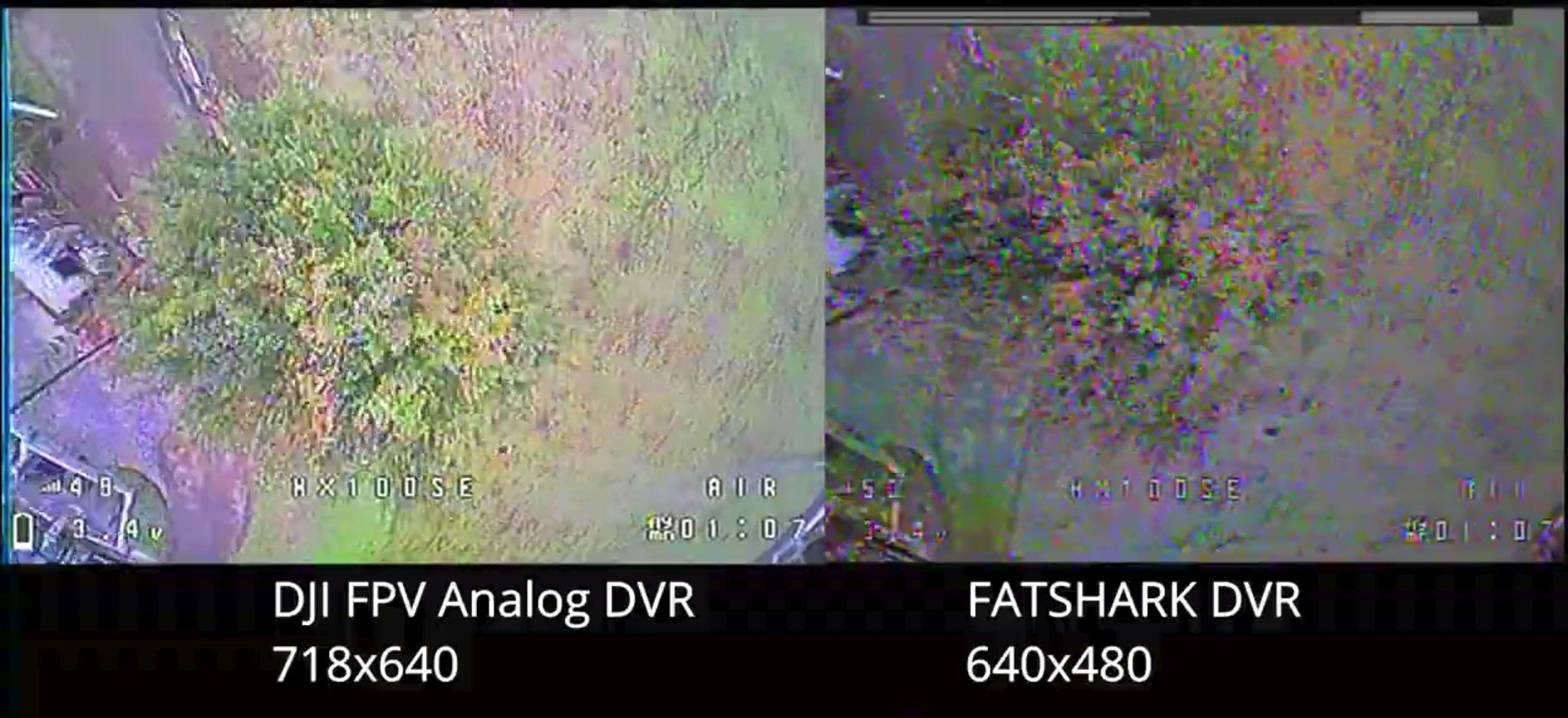
DJIゴーグルは 718×480 のH.264 で録画してくれる。(typoしとる、、)
FATSHARK は 640×480 の MotionJpeg。
比較するとわかるが、DJIゴーグルは録画範囲が広い。(電池マークで比較)
DJIゴーグルのほうが録画品質が高そうだが、なにぶん受信機の性能に差がありすぎ。
PRO58 RX のファームを AchilleΣ にしたら、ちっとはマシになる?
https://achillesfpv.eu/
あとこの形状もあって、ちょっとかさばる。
毎日ドローンバックを運ぶ身としては、なんかケース探してこないとなと思う。

DJI ゴーグルは、現代っぽいちゃんとした製品だなあと思うが、細かい使い勝手がアレ。
FATSHARK は使い慣れたのもあって、一連の作業はさっくりできる。
あとはそうだなあ、DJIゴーグルは、メガネかけて使うことができる形状になっているので、おもったより箱メガネ的。
それゆえ上のゴムが威力を発揮するのだが、この形状だと、ゴーグルをちょっとおでこにあげるとか、首に巻いて動くとか、そういうのに適さない。
箱メガネの時の悩み再びって感じだ。
しばらくこれを使ってみるかなーって思ってる。
2021/4/8追記。
この記事から随分たちました。
取り回しがめんどくさくて、けっきょくFATSHARK HDO2使ってます。
さて、DJI FPV ゴーグルは v2 となりました。
DJI FPVについてくるもので、デザインとかほとんど差はないやつです。
ゴーグル本体も日本で購入可能になりました。
しかし、このアナログ入力機能については使えないようです。
説明書にもいかにもできそうな感じで書いてあるけど使えないそうです。
ということで、念の為追記しておきました。